深蓝学院移动机器人运动规划教程介绍
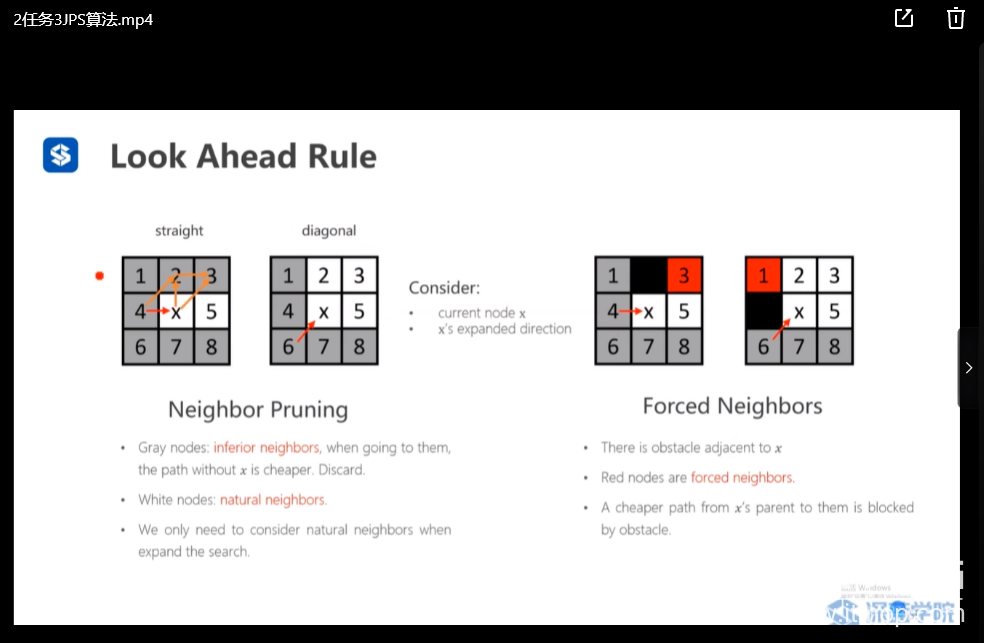
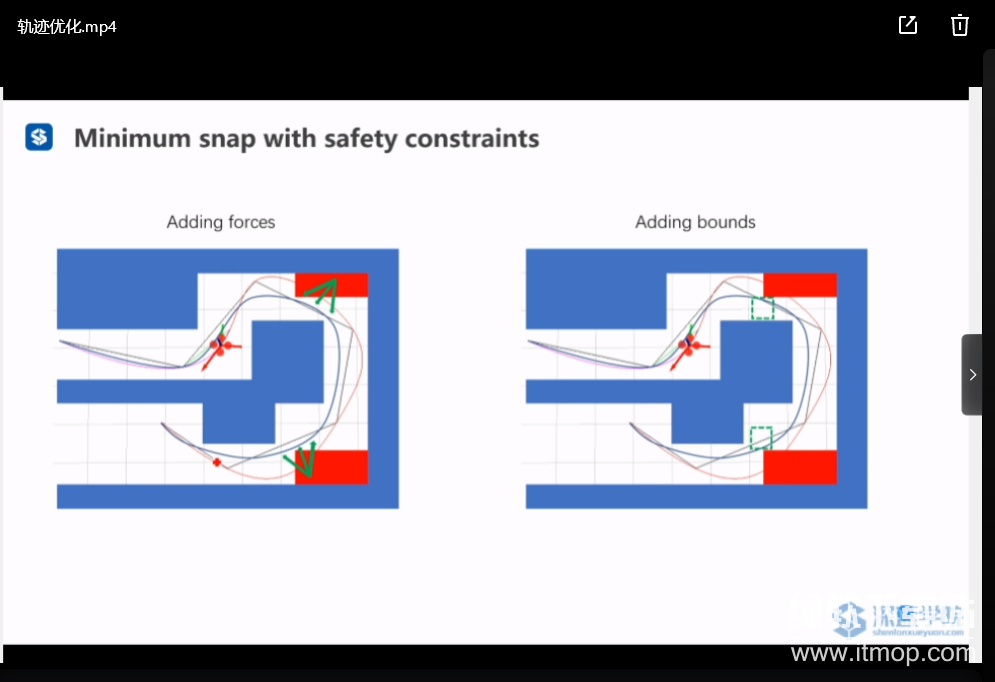
本教程深入探讨移动机器人运动规划的核心技术,全面覆盖从路径搜索到轨迹优化的全流程知识。课程由浙江大学控制科学与工程学院的高飞教授领衔开发,结合其团队在Science Robotics、IEEE TRO等顶级期刊发表的60余篇论文成果,系统讲解搜索类(A*、JPS)、采样类(RRT*)算法及基于动力学的混合算法。课程内容不仅涵盖自动驾驶和服务机器人等实际应用场景,还通过理论推导与工程实践相结合,帮助学员掌握在复杂环境下生成安全轨迹的核心能力。无论是初学者还是有一定经验的开发者,都能从中获得宝贵的知识和技能。

此外,课程还特别注重实际应用,通过丰富的案例分析和实战项目,使学员能够将所学知识迅速转化为实际工作中的解决方案。课程的设计充分考虑了不同层次学员的需求,确保每个人都能在课程中找到适合自己的学习路径。
实战驱动:企业级项目与算法落地
课程采用“理论-代码-部署”三维教学模式,提供12个脱敏企业项目案例。实战环节包括:
- 自动驾驶轨迹优化:基于模型预测控制(MPC)设计纵向巡航控制器,实现高速弯道场景下的轨迹跟踪;
- 无人机集群避障:使用VO类算法实现多无人机动态避障与编队控制;
- 工业机器人路径规划:结合状态栅格搜索算法,生成满足机械臂运动学约束的抓取路径。所有项目均提供ROS功能包与C++代码库,支持学员在Gazebo仿真环境中快速验证算法效果。
通过这些实战项目,学员不仅能够深入理解算法的原理,还能掌握如何在实际项目中应用这些算法。课程还提供了详细的代码注释和项目文档,帮助学员快速上手并解决实际问题。
资源赋能:持续进化的学习生态
课程配套资源包含三大核心模块:
- 技术工具链:提供OccupancyGridMap、ESDF地图构建工具,以及基于的轨迹优化库MINCO;
- 知识库:收录2015-2025年顶会论文解析、算法复杂度对比报告及工业界落地案例;
- 社群支持:学员可加入专属技术社群,获取讲师实时答疑与行业动态同步。数据显示,往期学员项目落地效率提升70%,其中40%的学员在6个月内完成从学习到企业级项目交付。
课程还提供了丰富的学习资源,包括视频教程、在线测试和项目评估,帮助学员全面提升自己的技能水平。社群支持模块不仅提供了与讲师和其他学员交流的机会,还定期举办线上线下的技术分享会,帮助学员了解行业最新动态。





在快节奏的现代生活中,越来越多的人选择通过收听有声小说来放松身心,享受阅读的乐趣。听小说软件的出现,不仅让阅读变得更加便捷,还让用户可以在通勤、健身或做家务时轻松获取知识。为了帮助大家找到最适合自己的有声小说软件,86ps软件园精心整理了一系列优质的听小说app推荐。大家可以根据自己的喜好选择不同的听小说软件,享受高品质的音频体验。

市面上各种二建题库app层出不穷,功能和侧重点各有不同。为了帮助考生高效备考,快速掌握知识点,顺利通过考试,86ps软件园为大家整理了一些备受好评的二级建造师题库app,涵盖历年真题、考点精讲、模拟测试等丰富资源,助力考生查漏补缺,各个击破。无论你是零基础小白还是想要冲刺高分,都能在这里找到适合自己的二建学习助手,轻松应对二建考试。

如今,越来越多的人在日常生活中遇到电脑问题时,选择使用现场电脑维修服务。这项便利的服务解决了找到可靠的电脑维修专家的问题,而不必把你的电脑带到维修店。如果你也在寻找一款靠谱的家用电脑维修服务app,不妨看看小编带来的家用维修电脑app精选。这些现场电脑维修app都通过了认证和评分系统,保证了师傅的专业性和服务质量。无论是安装系统、组装电脑还是其他电脑问题,你都可以在这些平台上轻松找到可靠的维修师傅,让你足不出户就能解决电脑问题。

车祸模拟器游戏中玩家可以体验各种车辆碰撞场景,感受金属碎片四溅的视觉冲击。从城市街道到荒野公路,从普通轿车到豪华跑车,丰富的场景和载具选择让解压过程更加畅快。这类游戏采用了物理引擎,每一次撞击都能呈现出真实的变形效果,带来极致的破坏快感。86ps软件园为大家精选多款优质的车祸模拟游戏,让玩家尽情释放压力,享受虚拟世界中的肆意破坏,感兴趣的朋友快来下载体验吧!














